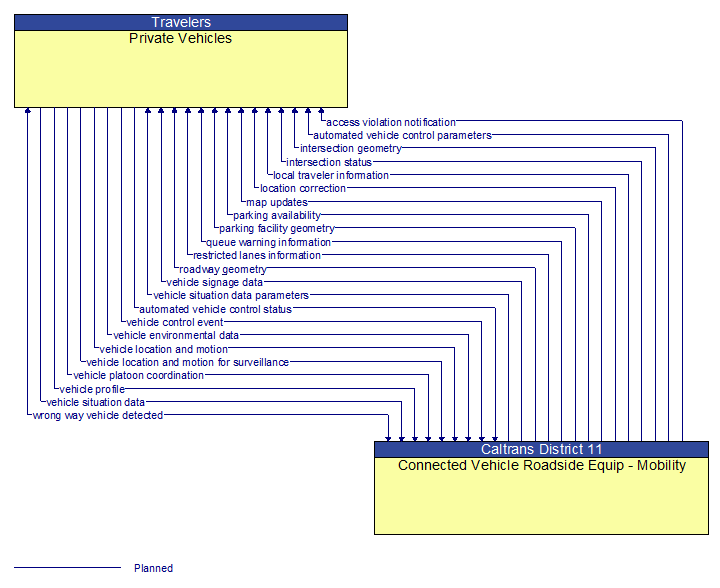
Interface: Private Vehicles - Connected Vehicle Roadside Equip - Mobility
Information Flow Definitions
access violation notification (Planned)
Notification that an individual vehicle or user has committed an access violation. The flow identifies the nature of the violation and the time and location where the violation was recorded.
automated vehicle control parameters (Planned)
Information, instructions, and control parameters for automated vehicle operations including current system conditions and advisories, control parameters (e.g., speed, required vehicle performance profiles, gaps or headways) and check in/checkout instructions.
automated vehicle control status (Planned)
Data provided by a connected vehicle identifying it's current mode and operational status and information provided to support check–in/checkout of the lane and coordinated maneuvers while on the automated facility.
intersection geometry (Planned)
The physical geometry of an intersection covering the location and width of each approaching lane, egress lane, and valid paths between approaches and egresses. This flow also defines the location of stop lines, cross walks, specific traffic law restrictions for the intersection (e.g., turning movement restrictions), and other elements that support calculation of a safe and legal vehicle path through the intersection.
intersection status (Planned)
Current signal phase and timing information for all lanes at a signalized intersection. This flow identifies active lanes and lanes that are being stopped and specifies the length of time that the current state will persist for each lane. It also identifies signal priority and preemption status and pedestrian crossing status information where applicable.
local traveler information (Planned)
Traveler information including traffic, road, and weather conditions for a particular locality. This flow includes the location–specific traveler information and time effectivity of the information.
location correction (Planned)
Information provided to improve positional accuracy. These corrections allow a mobile GPS receiver, such as a GPS system in a connected vehicle, to achieve a
greater absolute positional accuracy, compensating for errors that exist in satellite positioning.
map updates (Planned)
Map update that could include a new underlying static or real–time map or map layer(s) update. Map layers can include highways, major roads, streets, public transport routes, pedestrian routes, topography, points of interest, and regulatory information including turn restrictions and speed limits.
parking availability (Planned)
Information on available parking. This flow identifies available spaces with associated information about parking restrictions and location for each available space. Specifically includes information on parking for commercial vehicles, coaches/buses, and cars – and likely also motorcycles, electric vehicle plugins, etc.
parking facility geometry (Planned)
Precise spatial description of a parking facility that locates each parking space and the ingress and egress routes that are used to travel to and from the spaces.
queue warning information (Planned)
Information regarding formed or impending queues (location of the end of queue, estimated duration of the queue, and other descriptions of the queue condition) and recommendations for upstream vehicles including speed reduction, lane change, or diversion recommendations.
restricted lanes information (Planned)
This flow defines the location, duration, and operating parameters for lanes that are reserved for the exclusive use of certain types of vehicles (e.g., transit vehicles) or vehicles that meet other qualifications (e.g., number of occupants, low emissions criteria). It identifies the lane(s), the start and stop locations, start and end times, vehicle restrictions, speed limits and platooning parameters.
roadway geometry (Planned)
The physical geometry of a road segment that specifies the location and width of each lane, including normal lanes as well as special lanes for pedestrians and bicycles, transit vehicles, and trains. This flow also may include the curvature, grade, and superelevation or banking of the road segment.
vehicle control event (Planned)
Notification that the vehicle has performed an emergency maneuver or action that could impact the safety of surrounding vehicles. This includes hard braking and activation of traction/stability control systems or other actions that warrant immediate notification of surrounding vehicles. The information flow conveys the current vehicle location, path, and current control actions. This may also include the list of maneuvers includes lane changes/departures and overtaking/passing maneuvers.
vehicle environmental data (Planned)
Data from vehicle safety and convenience systems that can be used to estimate environmental and infrastructure conditions, including measured air temperature, exterior light status, wiper status, sun sensor status, rain sensor status, traction control status, anti–lock brake status, vertical acceleration and other collected vehicle system status and sensor information. The collected data is reported along with the location, heading, and time that the data was collected. Both current data and snapshots of recent events (e.g., traction control or anti–lock brake system activations) may be reported.
vehicle location and motion (Planned)
Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size.
vehicle location and motion for surveillance (Planned)
Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. This flow represents monitoring of basic safety data ('vehicle location and motion') broadcast by passing connected vehicles for use in vehicle detection and traffic monitoring applications.
vehicle platoon coordination (Planned)
Coordination of control commands between leader and follower vehicles allowing vehicles to join, coordinate with, and separate from platoons of cooperative vehicles. This flow shares platoon size, location, and performance parameters (e.g., platoon speed and spacing) between platooned vehicles. It also coordinates maneuvers between platooned vehicles, including maneuvers as vehicles join and leave the platoon.
vehicle profile (Planned)
Information about a vehicle such as vehicle make and model, fuel type, engine type, size and weight, vehicle performance and level of control automation, average emissions, average fuel consumption, passenger occupancy, or other data that can be used to classify vehicle eligibility for access to specific lanes, road segments, or regions or participation in cooperative vehicle control applications.
vehicle signage data (Planned)
In–vehicle signing data that augments regulatory, warning, and informational road signs and signals. The information provided would include static sign information (e.g., stop, curve warning, guide signs, service signs, and directional signs) and dynamic information (e.g., local traffic and road conditions, lane restrictions, work zones, detours, closures, advisories, and warnings).
vehicle situation data (Planned)
This flow represents vehicle snapshots that may be provided by the vehicle to support traffic and environmental conditions monitoring. Snapshots are collected by the vehicle for specific events (e.g., when a sensor exceeds a threshold) or periodically and reported based on control parameters when communications is available. Traffic–related data includes snapshots of measured speed and heading and events including starts and stops, speed changes, and other vehicle control events. Environmental data may include measured air temperature, exterior light status, wiper status, sun sensor status, rain sensor status, traction control status, anti–lock brake status, and other collected vehicle system status and sensor information. The collected data is reported along with the location, heading, and time that the data was collected.
vehicle situation data parameters (Planned)
A request for vehicle situation data that includes parameters used to control the data that is reported and the flow of data reported by the vehicle. This flow identifies the type of data/snapshots that are requested and reporting parameters such as snapshot frequency, filtering criteria (data thresholds for reporting), and reporting interval.
wrong way vehicle detected (Planned)
Notification that a vehicle has been detected traveling in the wrong direction. This can be a direct report by an equipped vehicle that is being driven in the wrong direction or a report of a non–equipped vehicle that has been detected traveling in the wrong direction. It includes the current location, speed, acceleration, and heading of the wrong way vehicle.